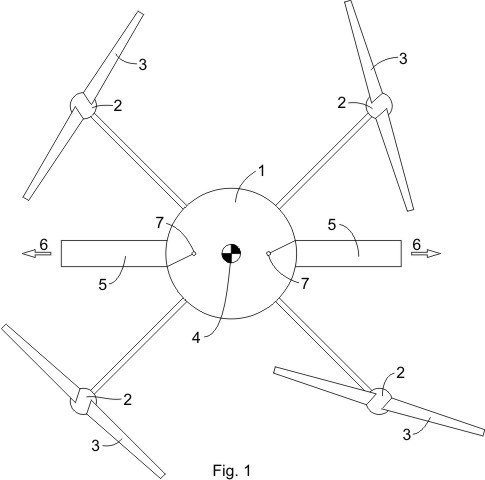
Below is a drone with two rescue parachutes. The capsules are located symmetrically on each side of the aerial vehicle and eject parachutes simultaneously. Two parachutes on the sides create a balanced load on the multicopter. The parachute ejection vector originates from the center of mass of the drone. When the parachutes are ejected, jet impulses compensate one another. The chassis of the drone is not tossed sideways or rotated. Parachute ejection only becomes possible after the engines are shut down. To eject the parachutes, you need to switch the trigger on the remote control twice. The parachute ejection force is sufficient for their complete unfolding. The risk of a parachute being ejected downwards and the drone falling on it is compensated by the presence of a second parachute. As a rule, multi-dome designs provide for a much more stable descent of the cargo load.


The rescuing system was developed for using in a light multicopter (a helicopter with several rotors). Its peculiarity is a possibility to spread out the parachute on a very low height. In other rescuing systems, a parachute is spread out by a spring or a pneumatic system or a pyrotechnical charge. Such systems have two important imperfections. The first of them is a shove that takes place on the moment of expulsion of the parachute from the container. It causes a destabilization of the aircraft and the straps may involve in the aircraft's rotors. The second imperfection: the aircraft moves downwards for several metres until the air flow spreads out and opens the parachute canopy. In the presented system, the reactive engines draw out the parachute upwards. On activation of the system of expulsion, no shove is caused to the aircraft under rescuing. The parachute arises over the aircraft and its canopy is spread out to the full length.
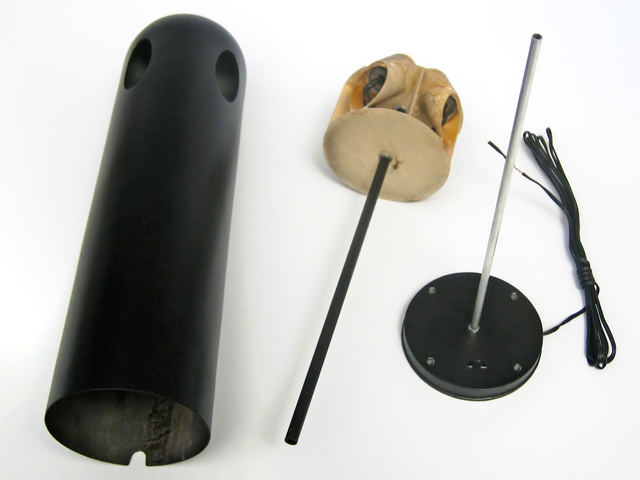
The mass of the reactive capsule with a parachute is 400 g. The area of the round parachute is 4.5 m2.
On the first on-land test, the delay of activation of reactive engine was longer than required. Because of this, the experiment was found to be unsuccessful. It was decided to use in future a simpler system of pyrotechnical spreading of a parachute as compared to the ones usable in standard models of missiles.
I hope the described experience will be useful for persons involved in developing their own rescuing systems in future.