Стереоскопическое видео, снятое при помощи радиоуправляемых летательных аппаратов
FPV расшифровывается как «глазами первого лица» (First Person View). Этот термин используют, когда на радиоуправляемой модели установлена видеокамера и оператор может видеть изображение в реальном времени. Термин стерео означает, что для каждого глаза отображаются раздельные изображения.
Стереоскопическое 3D side-by-side full-frame. Используйте очки-адаптер для смартфона.
Стереоскопическое side-by-side half-width. Формат для 3D проигрывателей..
Стереоскопическое 3D анаглиф. Используйте очки с красным и синим фильтрами.
Техническое описание проекта
Введение
Настройка видеокамер
Отображение стереоизображения
Печать стереоизображений
Самолет для стереосъемки
Вертолет со стереокамерами
Мультикоптер для стересъемки
Фото и видео примеры
Введение
Сейчас модно говорить о 3D изображении, но в данном случае этот термин не точен. Термин 3D предполагает наличие трехмерного пространства или его модели. Примером визуальной трехмерной модели может быть голограмма. Если вы посмотрите на голограмму слева, то увидите левую сторону объекта, если справа – правую. Телевизор, на котором написано 3D в действительности не отображает трехмерного пространства, а просто чередует разные картинки для левого и правого глаза. По аналогии с воспроизведением звука, когда для каждого уха воспроизводится отдельный звуковой канал, термин стерео используется для фото и видеоизображений. Благодаря бинокулярному зрению и диспаратности человек может подсознательно ощущать разницу дистанций до отображаемых объектов. При просмотре таких изображений усиливается эффект присутствия. Возможность ощущать дистанцию значительно облегчает пилотирование радиоуправляемого аппарата. Висящие провода в "2D" над полем могут быть не заметны, а в "3D" они четко выделяются. Человек в лучшем случае способен объективно оценивать дистанцию до 100 метров. Для летательного аппарата этого не достаточно. Для увеличения оцениваемой дистанции необходимо установить объективы двух камер на большем расстоянии. Максимальная дальность оцениваемого за счет диспаратности расстояния вычисляется следующим образом:
1. допустим, что используется видеокамера с горизонтальным разрешением 640 точек
2. допустим, что угол горизонтального обзора камеры равен 120 градусов
3. допустим, что можно ощутить разницу изображений при смещении отображаемого объекта на 0,5 пикселя
4. допустим, что расстояние между объективами равно 2 метра
5. вычисляем дистанцию: 2/sin(120/640*0.5)=1222метра
2 метра – это в 30 раз больше, чем расстояние между глазами у человека и окружающий мир будет подсознательно восприниматься как уменьшенная модель этого пространства. Камеры должны быть закреплены на жесткой основе. На этом изображении представлен пример установки двух камер на штативе:

На этом видео продемонстрирована ручная подвеска камер с кардановым подвесом:

За счет точной балансировки такая подвеска позволяет осуществлять съемку на ходу и при этом камеры не будут раскачиваться. Точная балансировка по вертикали осуществляется за счет грузов, которые фиксируются гайками. Точная балансировка по горизонтали осуществляется за счет перемещения грузов, которые прижаты к основе сильными магнитами.
Настройка видеокамер
На данный момент в продаже нет любительских камер, приспособленных для совместной работы с другой камерой для получения стереоизображений. Так как запись сигнала осуществляется на разные носители, то для облегчения монтажа желательно синхронизировать управление камерами через разъемы внешних пультов. Использование камер с оптическим или цифровым стабилизатором изображения не желательно, так как на двух камерах стабилизаторы будут действовать по-разному и это будет заметно. Две видеокамеры должны быть точно направлены в одну удаленную точку. Для настройки необходимо на видео камерах включить максимальное приближение (оптическое и цифровое); выбрать удаленный объект; добиться того, что бы этот объект был точно в центре кадра двух камер; зафиксировать положение камер; вернуть трансфокаторы в широкоугольный режим. Если планируется снимать объекты на малом расстоянии, то пересечение оптических осей следует осуществить на меньшей дистанции. У человека взор легко перекрещивается, а вот развести в стороны глаза не получается. Так что есть смысл перекрещивать стереокамеры на более близкой дистанции. Смещенный горизонт глаза автоматически сведут. В пьяном состоянии изображение двоится из-за перекрещивания взора на близком расстоянии. Опытным путем определил, что у человека это примерно 0,5м.
Существует мнение, что оператор должен изменять угол пересечения оптических осей в зависимости от объекта съемки. В случае с FPV я с эти не согласен. Мозг и глаза хорошо сводят две картинки с небольшим смещением. Объясню на примере:
На стерео картинке есть котик на расстоянии 1 м и обнаженная женщина на расстоянии 10 м. У одних зрителей внимание будет обращено на котика, а у других на женщину. Если ориентация камер постоянная, то взор, переходя от одного объекта к другому, сам моментально настраивается. Если направления камер смещать по замыслу оператора, то это может не совпадать с тем, на какой объект будет смотреть зритель. Воспринимать такой материал будет не комфортно.
Если необходимо снимать объект на большем удалении, то необходимо расширять стереобазу (расстояние между объективами), а угол пересечения оптических осей оставлять в пределах 2-6 градусов (1-3 градуса для каждой из двух камер). Если главный объект съемки чаще оказывается близко к камере, то следует выбрать угол 3 градуса для каждой камеры. Если главный объект съемки чаще оказывается на большем удалении, то следует выбрать угол 1 градус для каждой камеры.
Человек способен безотносительно определять расстояние на очень небольшой дистанции. Например, находясь в полной темноте, человек может определить расстояние в несколько метров до пролетающего светящегося жука. Если есть несколько объектов на разной дистанции, то человек лучше определяет расстояние. Например, если с корабля виден свет маяка на расстоянии в 100 метров на фоне яркого звездного неба, то эта дистанция будет ощутима для человека с хорошим зрением. Чтобы на видеоматериале стереоскопический эффект проявлялся сильнее, нужно держать в кадре несколько объектов на разном удалении. В качестве искуственного ориентира можно добавить к изображению титры.
Работа с двумя камерами без кабеля синхронизации. Включите запись на обеих камерах вручную. Громко хлопните в ладоши перед началом съемки. После съемки импортируйте оба видеоматериала в один проект программы SONY Vegas Movie Studio. Графическое отображение звуковых дорожек поможет осуществить синхронизацию двух файлов. После синхронизации объедините два канала в один стереоскопический.
Отображение стереоизображения
«3D» видеосигнал для телевизора или видео-очков обычно использует черезстрочную развертку для последовательной передачи двух изображений. Вероятно, скоро появятся электронные схемы для генерации комбинированного сигнала с двух камер на борту модели, а пока я описываю работу без такой схемы (2010 год). Две любительские видеокамеры дают на выходах аналоговые видеосигналы. Эти сигналы можно передать с помощью двух видео передатчиков. Для отображения собран портативный стерео дисплей с двумя экранами и четырьмя зеркалами, как это показано на изображениях:
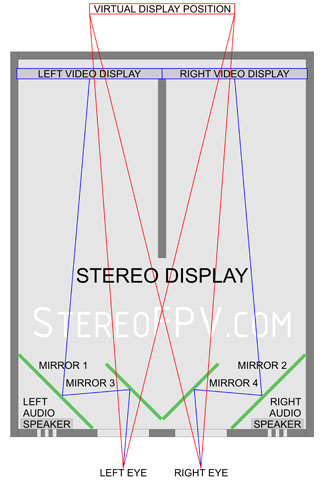

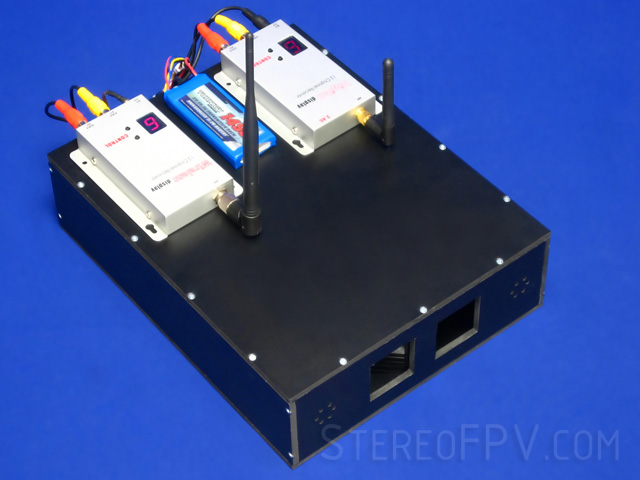
Такой дисплей великоват, но его можно поставить перед собой или повесить на груди. Достоинство дисплея – отсутствие солнечных бликов, так как посторонние лучи не попадают на экран. Другое преимущество такого отображения заключается в том, что нет постоянного мерцания как при использовании затворных очков, которые поочередно закрывают глаза.
Печать стереоизображений
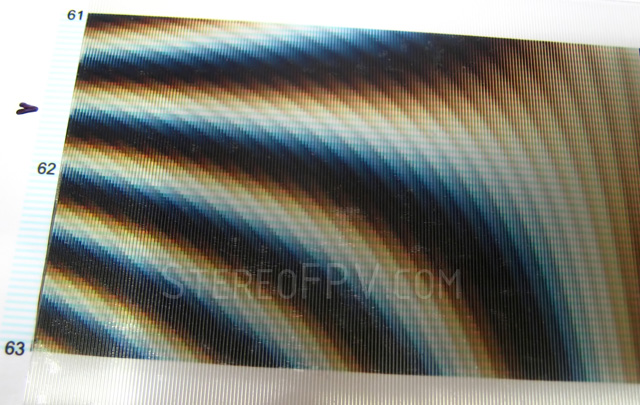
Cтерео изображения можно изготовить на домашнем фото-принтере или распечатать в фотолаборатории. Необходимо дополнительно приобрести лентикуляры (lenticular lens) с клеевым слоем. Лентикуляры это прозрачная пленка с микролинзами, наклеиваемая на отпечатанное изображение. Рекомендуемая линиатура лентикуляра – 62 lpi. Можно купить специальную программу для подготовки стерео печати, но можно обойтись и простым графическим редактором. Сперва необходимо отпечатать тест, представляющий чередование вертикальных линий с периодом от 1/61 до 1/63 дюйма.
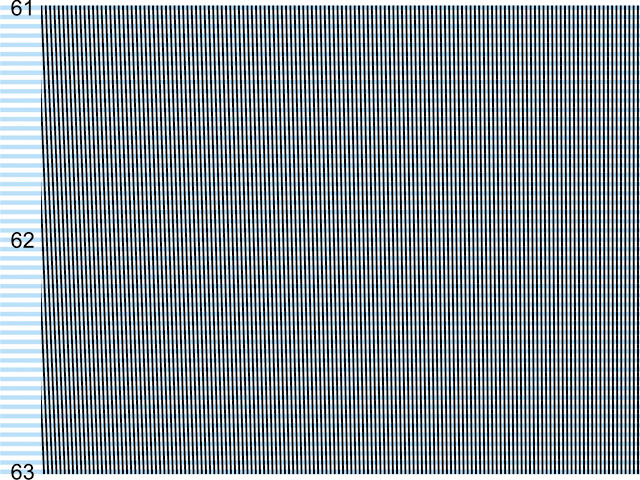
Это необходимо для определения точного соответствия требуемой линиатуры с лентикуляром. При правильно подобранной линиатуре наложение лентикуляра дает однородный фон, без полос.
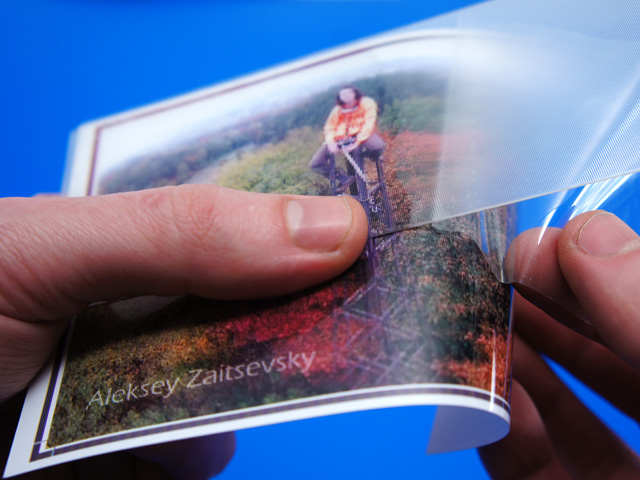
Для двух совмещаемых изображений следует установить разрешение DPI равное двойной линиатуре лентикуляра, например 62,3х2=124,6. Далее необходимо использовать изображение вертикальных линий с требуемой линиатурой как маску для наложения двух изображений. Левое и правое изображение чередуется вертикальными полосами, находящимися точно под наклеенными линзами. При приклеивании лентикуляров потребуется большая аккуратность.
Самолет для стереосъемки. Годы 2010-2011.
Самолет был спроектирован и построен специально для стереоскопической съемки. Две камеры высокого разрешения закреплены на консолях крыла. Крыло сделано не разъемным и повышенной прочности. Компоновка несущих поверхностей выполнена по классической схеме.
Комплектация:
Пульт управления Turnigy 9X. Это не дорогой, достаточно качественный и удобный для модернизации пульт.
Первый передатчик управления FrSky ACCST 2.4Ghz 60mW DIY модуль. С направленной антенной 14dbi обеспечивает связь на расстоянии 4 км.
Второй передатчик управления FM1107 72MHz. Обеспечивает связь на расстоянии 10км (максимальная дальность связи с возможными помехами – более 20км).
Первый приемник управления FrSky V8FR.
Второй приемник Corona RP8D1.
Мультиплексор бортовых приемников RX-Multiplexer, MyResearch.Lt. Контроль модели одновременно в двух частотных диапазонах обеспечивает высокую надежность связи. Приемники размещены в хвостовой части фюзеляжа.
Первый канал видеосвязи 5.8 Ghz. Дальность связи с направленной антенной 12dbi - 5 км
Второй канал видеосвязи 1.2 Ghz. Дальность связи с направленной антенной 10dbi - 10 км. Использование разных передатчиков приводит к различию в качестве видеосигналов, но это обеспечивает более надежную связь. Передатчики установлены на краях крыльев.
Видео дисплей 7 дюймов (без названия). Дисплей используется для отображения одного из двух видеосигналов с возможностью переключения. Этого достаточно для настройки камер и для контроля модели в полете.
OSD телеметрия EasyOSD. Используется для одного видеоканала.
Синхронный контроль видеокамер RC-Shutter, MyResearch.Lt.
Контроль пиротехнических эффектов FireStarter, MyResearch.Lt.
Датчик низкой высоты DistanceSensor, MyResearch.Lt.
Сервомеханизмы TGY-9150MG, 4 шт.
Двигатель TURNIGY TR 50-65B 350kv.
Регулятор оборотов Turnigy Brushless ESC 85A, 5A SBEC. Встроенный стабилизатор напряжения используется как дублирующий для бортовой аппаратуры.
Аккумулятор питания двигателя ZIPPY Flightmax 5000mAh 6S1P 15C, два комплекта.
Основной стабилизатор напряжения TURNIGY 8-15A UBEC. Питается от отдельного аккумулятора ZIPPY Flightmax 2600mAh 2S2P 30C Lipo.
Аккумулятор пульта управления и видеодисплея Rhino 2620mAh 3S.
Зарядное устройство Turnigy MAX80W 7A.
Материалы: бальза, сосна, фанера, пленка, клей, стойки шасси, колеса, завесы, тяги, качалки, пропеллеры, провода, разъемы, габаритные огни, радиодетали, прочее.
Стоимость перечисленных комплектующих, без учета видеокамер и частично используя электронику собственной сборки (MyResearch.Lt) – примерно 1200 USD (основные поставщики: hobbyking.com , leiniaohangdui.taobao.com). Доставка комплектующих из Китая в Литву, таможенные пошлины и затраты на оформление таможенных документов – примерно 500 USD. Все комплектующие были приобретены в 2010 году.
Затраты времени: проектирование самолета – 1 неделя, подбор комплектующих и поставщиков – 1 неделя, изготовление самолета и настройка оборудования – 6 недель.

В большинстве случаев достаточно обеспечить связь с самолетом на расстоянии до 1 км и для этого достаточно обычных систем управления. Для увеличения дальности связи можно использовать направленные антенны. Передатчики повышенной мощности можно приобрести или собрать самостоятельно, но закон ограничивает их применение. Полезную информацию о мощных передатчиках можно найти на сайте fmdiy.com. В любом случае, включать мощный передатчик можно только в безлюдных местах и на свободной частоте. Так как убывание поля равно квадрату расстояния, то на расстоянии сотен метров ваше излучение уже не будет вызывать подозрения. Для безопасности при полетах на большие дистанции следует установить автопилот, например FYETECH FY-21AP или хотя бы систему стабилизации FMA Direct CoPilot.

На самолете были установлены две модифицированные камеры Speed-120. Это не дорогие (240 долларов каждая) ручные камеры, разрешение видеосигнала 1920x1080P. Основные недостатки для профессиональной работы: неудовлетворительная настройка баланса белого, низкий бит-рэйт записи сигнала. Более дорогие камеры не устанавливались из-за высокого риска разбить их.

Вертолет со стереокамерами. Годы 2011-2012
Использован пилотажный вертолет T-Rex-700. Над хвостовым ротором установлена стереопара из двух камер GoPro Hero2. Эти камеры используются для съемки самого вертолета. Для съемки удаленных объектов на корпусе зафиксированы еще две камеры Sony NEX-5. Стереобаза для второй пары камер составляет 1 метр.

Мультикоптер для стересъемки. Год 2012.
Квадрокоптер Ecilop Stereo – первый коммерческий аппарат для художественной стереоскопической съемки с высоты птичьего полета. Эффект объемного пространства ощущается на удалении от 3 до 300 метров.

Фото и видео примеры
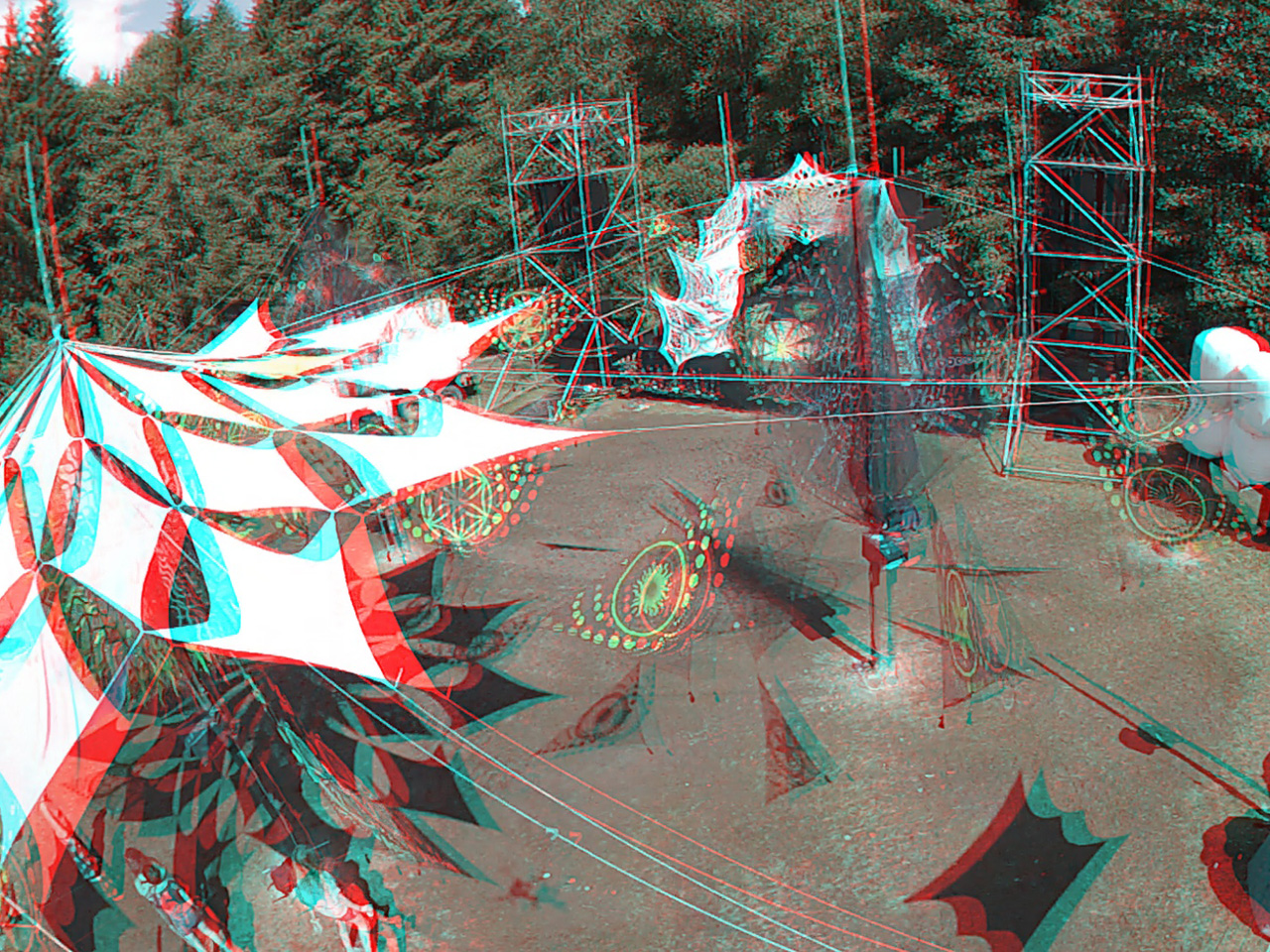
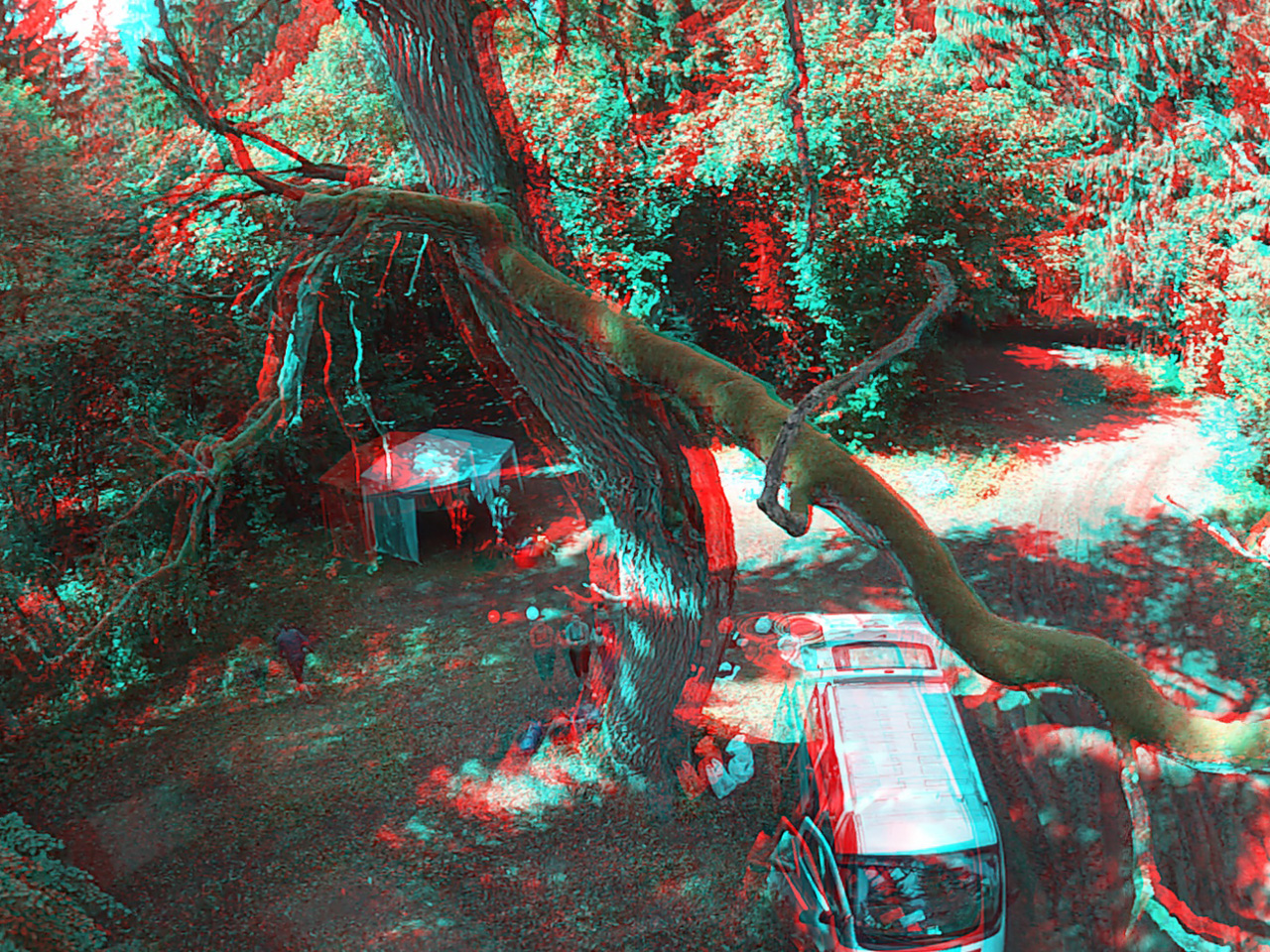
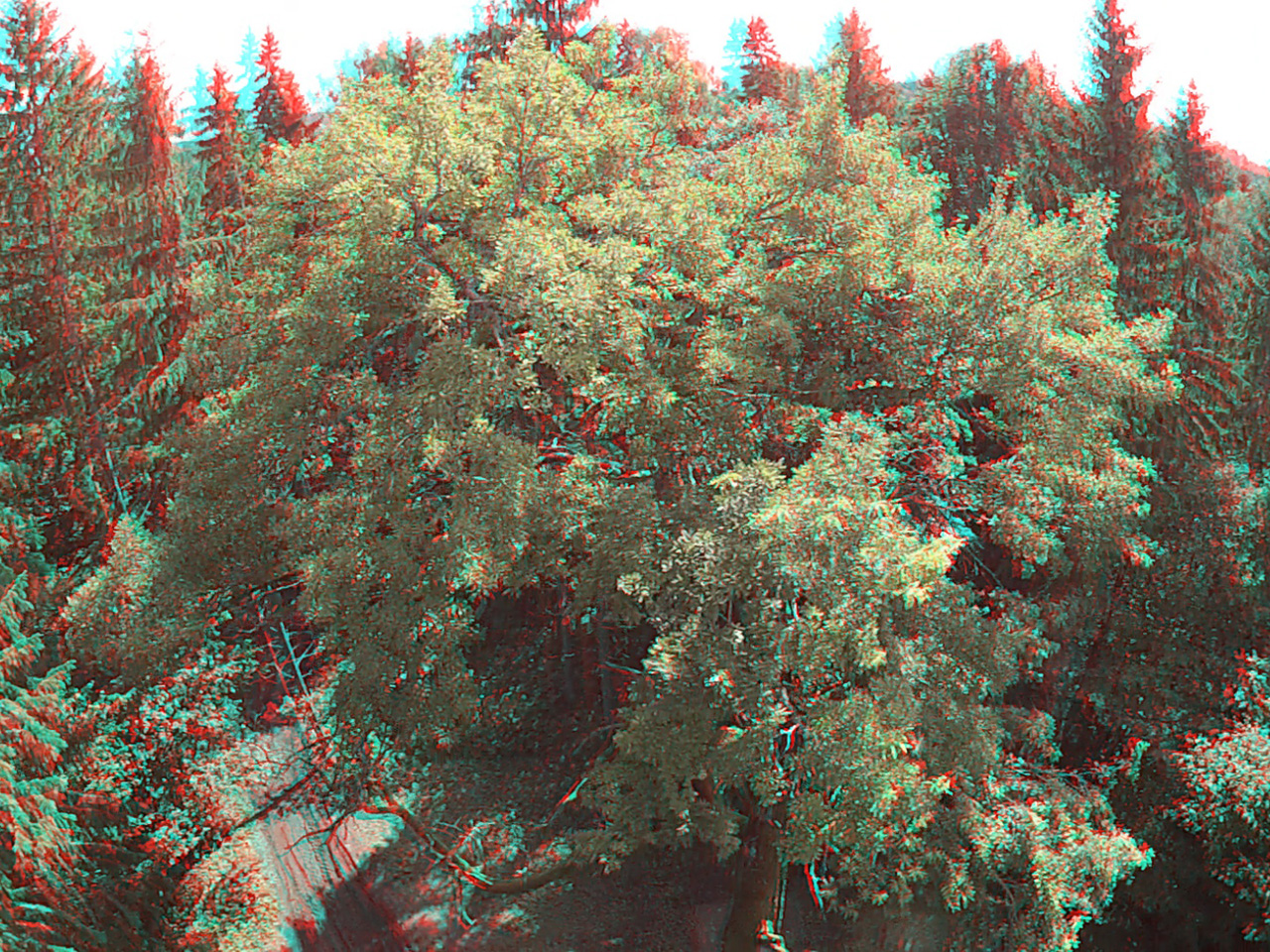
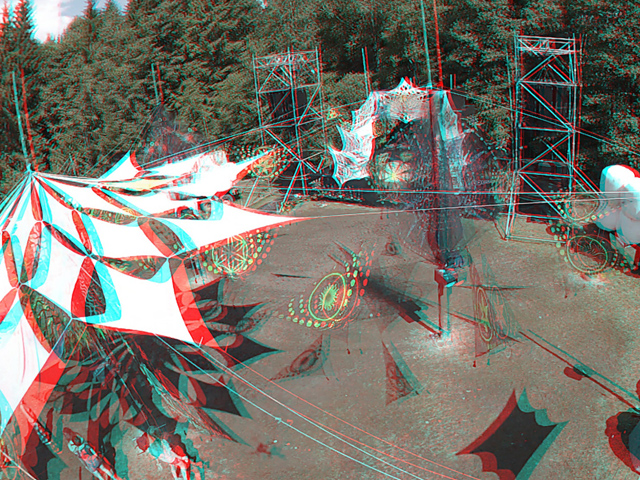
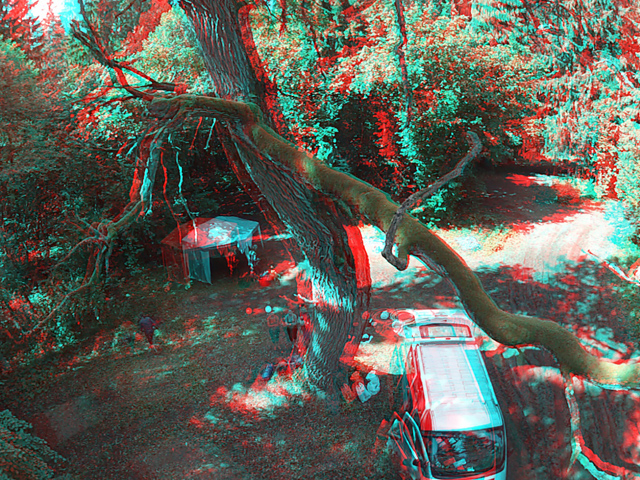
Анаглиф Красный / Голубой, кликнуть для увеличения








|