Модификации исполнительных механизмов
Увеличение угла отклонения сервомеханизма до 180 градусов
Обычные сервомеханизмы обеспечивают угол отклонения качалки на 120 градусов (+-60) или даже меньше того. Для управления шасси или поворотом видеокамеры или в некоторых иных случаях требуется отклонение качалки на больший угол. Данная задача может быть решена следующими способами:
А) Приобрести специализированный сервомеханизм с отклонением качалки на 180 градусов.
Б) Приобрести цифровой и программируемый сервомеханизм с возможностью отклонения на 180 градусов, а так же программатор к нему.
В) Изменение управляющего сигнала дополнительным электронным блоком. Многие сервомеханизмы могут отклоняться на 180 градусов и даже более, но для этого длительность управляющего электрического импульса должна быть расширена со стандартного интервала 1000-2000 микросекунд до 600-2400 микросекунд.
Г) Установка двух дополнительных электрических сопротивлений в сервомеханизм.
Порядок установки дополнительных сопротивлений.
Возьмите сервомеханизм (аналоговый или цифровой – не имеет значения) и, не подключая его к приемнику, вращайте рукой качалку. Необходимо убедится, что требуемая величина отклонения механически возможна. Далее снимите нижнюю крышку сервомеханизма. Электронная схема внутри подключена к двигателю и потенциометру. От потенциометра идут три провода – два по бокам и один по середине. Провода идущие от боковых контактов надо перерезать. Чтобы сервомеханизм, обеспечивавший отклонение на 120 градусов, стал вращаться на 180 градусов, необходимо между разрезанными концами проводов установить сопротивления, равные 25% от значения сопротивления потенциометра. Если значение сопротивления потенциометра на нем не указано, то его можно померить, подключив тестер к двум отрезанным проводам. Обычно в сервомеханизмах устанавливаются потенциометры на 5 или на 10 кОм. Если установить не постоянные резисторы, а миниатюрные потенциометры, то крайние положения качалки можно будет регулировать. Так же можно установить постоянные резисторы, сопротивление каждого их которых будет примерно 30-35% от значения сопротивления потенциометра серво. В этом случае серво будет упираться в механический ограничитель и необходимо будет ограничить движение серво в меню пульта управления.
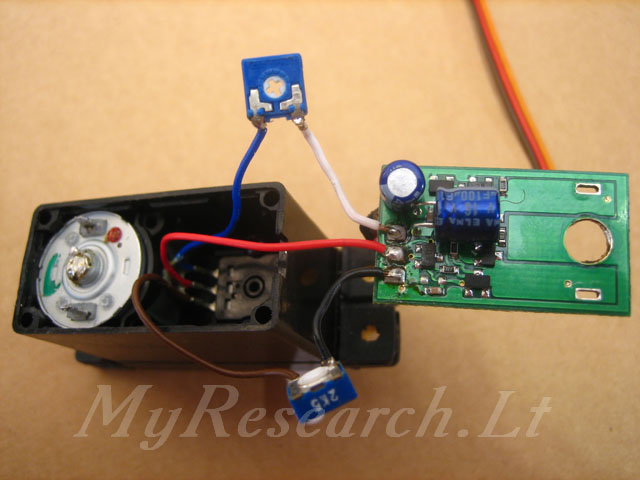
На изображении стандартный сервомеханизм из комплекта аппаратуры Spectrum. Сопротивление потенциометра – 5 кОм, дополнительно установлены два потенциометра по 2,5 кОм, максимальное отклонение составляет около 200 градусов (+-100).
Увеличение угла отклонения сервомеханизма до 360 градусов
Если нужен сервомеханизм, вращающийся по кругу без ограничений на 360 градусов, то необходимо:
А) вытащить или сточить или срезать на последней шестерне механический ограничитель вращения;
Б) отсоединить потенциометр от механизма;
В) включить сервомеханизм и настроить потенциометр так, что бы при нейтральном сигнале управления моторчик не вращался;
Г) собрать сервомеханизм.
Теперь сервомеханизм будет вращаться по кругу в соответствии с сигналом управления, но без возврата в исходную позицию.
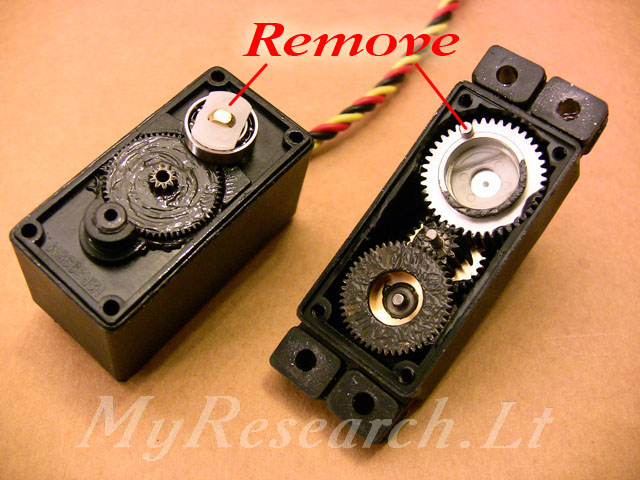
На фотографии отмечены шестерня с ограничителем, который нужно вытащить и вставка, соединяющая механизм с потенциометром, которую нужно убрать.
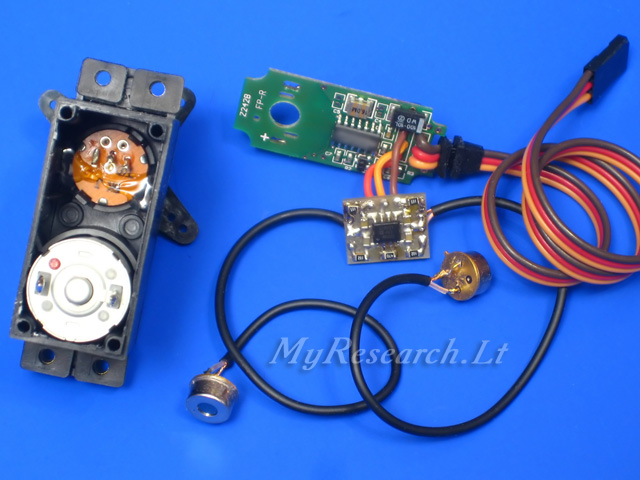
Сервомеханизм с датчиком горизонта
Такой сервомеханизм может использоваться для управления креном летающего аппарата или видеокамерой. Вы можете управлять наклоном камеры, а нейтральное положение будет соответствовать линии горизонта. Так же можно управлять элеронами самолета, при этом вы можете наклонять самолет на заданный угол относительно горизонта. Если линия горизонта не симметрична, то это вызовет наклон самолета. Схема датчика:
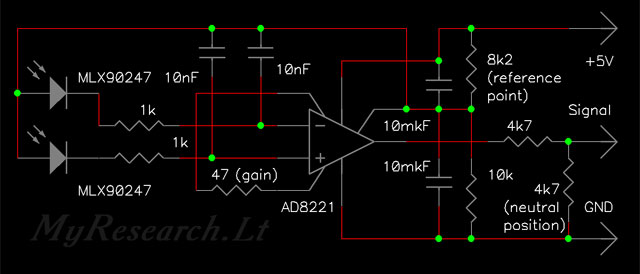
Плата:
Фотоэлементы устанавливаются на подвижной части управляемой подвески видеокамеры или на противоположных краях управляемой модели. Сигнал датчика подается на обычный сервомеханизм вместо внутреннего потенциометра. Потенциометр в сервомеханизме подключен к минусу, опорному питанию и имеет один выход (3 провода), таким же образом подключается инфракрасный датчик.
Сервомеханизм с магнитным датчиком положения
Такой сервомеханизм может использоваться для управления различной механизацией, например: выпуск шасси или вращение какого-то элемента через дополнительный редуктор. Я использовал такие датчики для выравнивания видеокамеры относительно положения механического гироскопа. Датчик Холла обеспечивает пропорциональную реакцию на изменение магнитного поля с учетом полярности. Отсутствие или нейтральное магнитное поле (на равном удалении от противоположных полюсов) в переделанном сервомеханизме соответствует нейтральному положению потенциометра в обычном сервомеханизме. Датчик реагирует на смещение или на вращение магнита, так же можно использовать два магнита для обозначения двух крайних положений. Схема подключения:

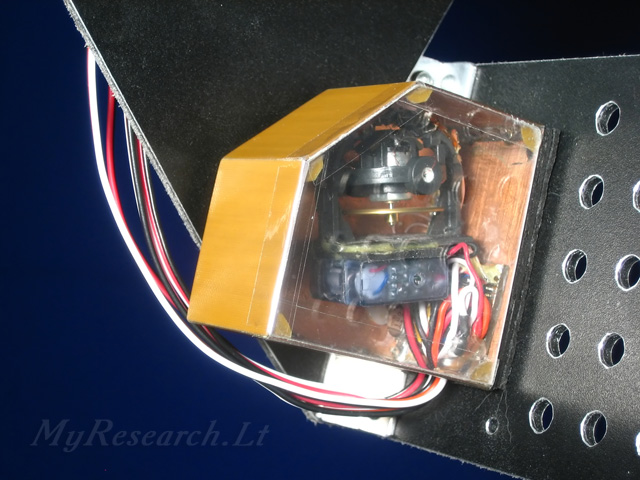
Механический гироскоп, используемый в качестве виртуального горизонта:
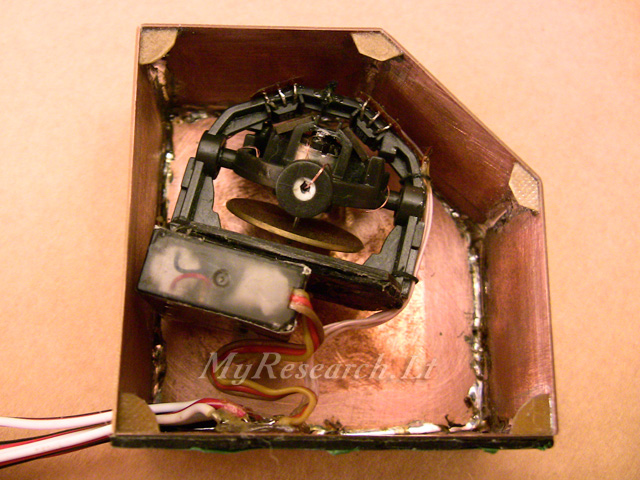
Положение гироскопа определяется магнитными датчиками. Наклон видеокамеры задается наклоном гироскопа:
|