Что такое «двойной сервопривод»
При осуществлении стабилизации раскачивающейся камеры сервопривод должен часто менять направление вращения. В результате работы сервомеханизма камера испытывает толчки небольшой амплитуды. Даже если удается устранить дрожание кадра посредством цифровой обработки видеоматериала, то четкость изображения все равно ухудшается, особенно при съемке с недостаточным освещением и удлиненной выдержкой кадра. Амплитуда нежелательных колебаний связана со следующими причинами: сумма люфтов в редукторе сервопривода, сумма люфтов в соединениях опоры, недостаточная жесткость конструкции, задержка реакции сервомеханизма на сигнал датчиков положения. Еще одни часто проявляющийся недостаток – раскачивание камеры, усиливаемое сервомеханизмом. Так как видеокамера обладает значительной массой, то за счет инерции она не останавливается в заданной точке после вращения. Сервомеханизм начинает возвращать камеру к заданной позиции, что в результате и приводит к усиливаемому раскачиванию.
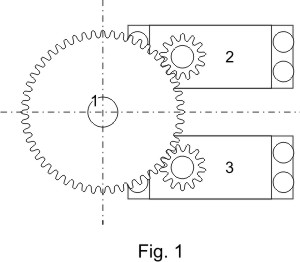
Цель изобретения – снизить нежелательные колебания видеокамеры при использовании сервопривода. Задача решается тем, что на каждую ось вращения устанавливается по два сервопривода. При вращении камеры сервоприводы действуют синхронно, но в нейтральном положении создают небольшую нагрузку в противоположных направлениях. В результате компенсируются люфты в трансмиссии, предотвращаются толчки при изменении направления вращения. Так же сокращается задержка реакции на сигнал управления.
Настройка двойного сервопривода для видеокамер
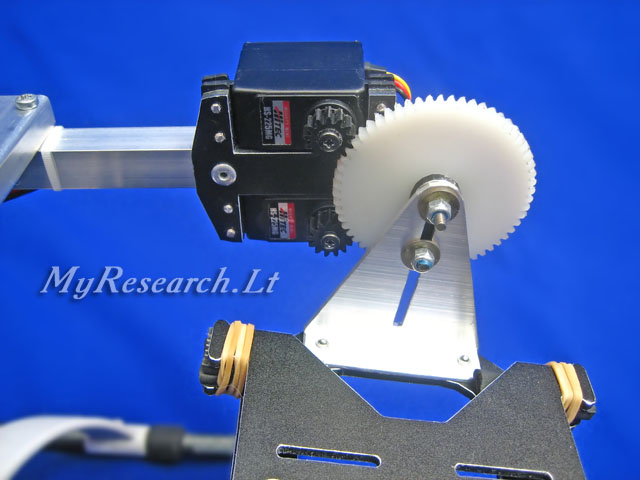
Двойной сервопривод используется для плавного управления и стабилизации видеокамеры. Двойной сервопривод устраняет люфты и предотвращает дрожание камеры при работе электронного гироскопа. Двойной сервопривод может быть изготовлен из двух обычных сервомеханизмов.
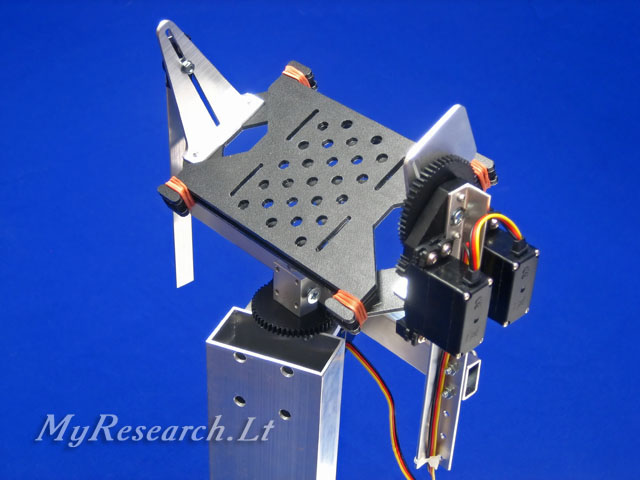
В подвеске применяются сервомеханизмы, модифицированные для вращения на 360 градусов. Оба сервомеханизма подключаются к одному каналу управления. При нейтральном сигнале управления попарно установленные серво должны медленно вращаться в противоположные стороны. Для синхронизации сервомеханизмов может быть применен электронный синхронизатор. Такие приборы выпускаются несколькими компаниями, но можно обойтись и без такого прибора. Скорость серво без нагрузки устанавливается потенциометром, который отсоединяется от шестерен. Предварительную настройку можете выполнить следующим образом: установите сигнал управления -2 процента от нейтрального положения и добейтесь остановки первого серво; установите сигнал управления +2 процента от нейтрального положения и добейтесь остановки второго серво. Если у вас есть такая возможность, то при настройке желательно измерять ток, который потребляет серво при силой остановленном двигателе. Начинайте настройку с небольшого тока, например 20 мА. При таком токе собранный сервомеханизм без нагрузки вращается очень медленно. Если на подвеске установлена тяжелая камера, а ее центр массы не совпадает с осью вращения, то для стабилизации необходимо будет увеличивать искусственную нагрузку на сервомеханизмы. Черезмерная нагрузка приведет к поломке сервомеханизма. По этому обращайте больше внимания на сбалансированность всего механизма, он не должен качаться как маятник.

