|
An autonomous buoy which allows panoramic scanning of underwater space using echolocation while rotating around its axis. Panoramic echolocation allows detecting underwater objects and determining their size, distance, and direction. The buoy is equipped with one or more engines which ensure the device rotation and maneuvering. The buoy automatically marks a place for fishing. While scanning, the buoy records its coordinates and echolocation vector. The scan result is shown as a three-dimensional model of the underwater space. The buoy communicates with the observation point wirelessly. Turn and position controls allow using narrow beam tele-communication equipment to increase the communication range. Maneuvering with one broken motor (out of two) is possible. Automatic obstacle avoidance. Air motor serves as an anemometer.  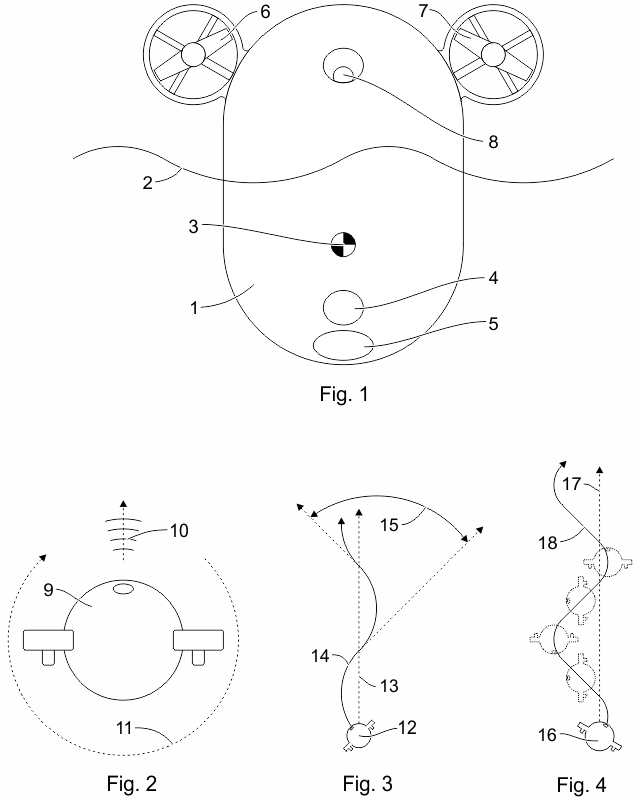 |