|
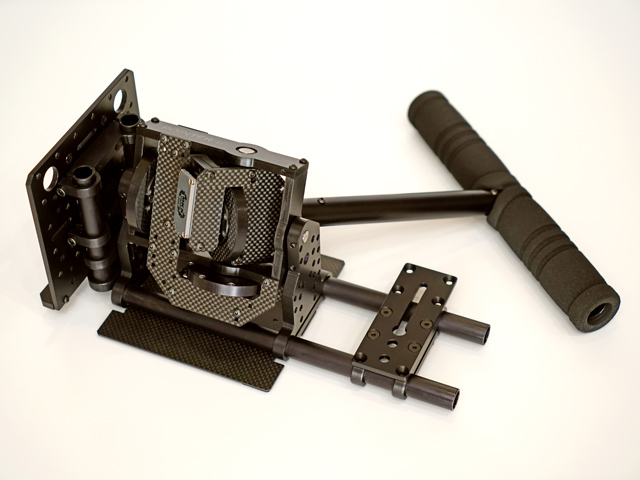
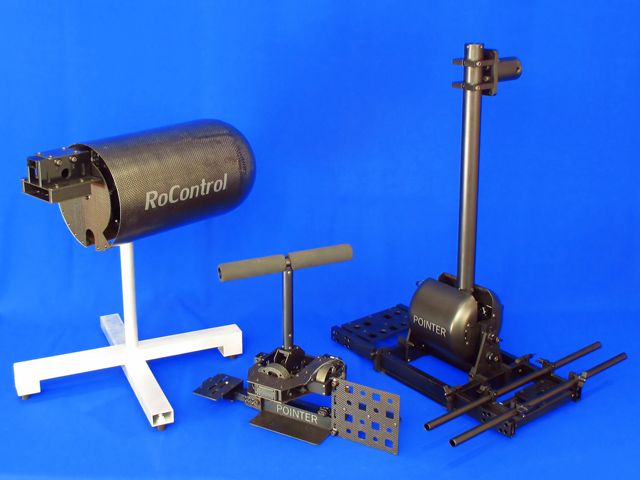
Inertial internal camera gimbal Prototype #1 Prototype #2 Prototype #3 Smaller, lighter and more accurate internal camera gimbal. The design of this stabilizer is drastically different from all current popular models. It doesn't have a large frame around the camera limiting the length of the camera and lens, doesn't use large bicycle type handlebars and has no requirement for a special stand. However, the main difference is in the new type of servo drives that it uses.
• The inertial stabilization effect is amplified by a factor equal to the square of the distance from the center of rotation. Thus, the camera's stability with a counterbalance is several times greater than when placing the camera inside a gimbal. • The joint between the camera and the counterweight is more durable and lighter. The compact axial unit makes it possible to increase accuracy and reduce vibration. • The axial unit is located in the center of the design and ensures that the load is evenly distributed on the bearings. The frictional force in such an assembly is several times lower than if the axial unit were placed to the side of the load. • The servo mechanisms include torque sensors and ensure the accurate operation of the rotation mechanism. (Several other stabilizers use motors with torque control of the current consumption, but this provides less precise control) • There is no rigid connection between the gearbox and the platform in the used servo motors. Thus, the platform is protected against angular mechanical noises and backlash. • The servo mechanisms provide rapid stabilization even when you tilt the platform by 90 or more degrees. Thus, the capabilities of this stabilizer with just three axes are greater than other devices with six axles. (meaning stabilizers that are equipped with duplicate fast motors with a limited angle of rotation and additional slow motors). • The servo mechanisms used to control the actual magnitude of the force are lighter and more powerful than direct drive motors. (meaning brushless motors with a direct connection). • A mechanical gyrostabilizer or a battery or a transmitter or a monitor or another load could be used as a counterweight. Counterweight could be twice lighter compared to camera.
POINTER stabilizer is using internal gimbal. The axial block is compact, rigid and lightweight, and the pressure on the bearings is evenly distributed. The higher the moment of inertia, the more accurately the position of the camera is maintained. The simplified formula for the moment of inertia is: J=mr^2 In the POINTER stabilizer, the moment of inertia is increased thanks to the mass of the counterweight and a larger radius. The POINTER stabilizer uses servos with controllable action force. The advantages of F-Servo in comparison with a direct drive are described here. An electronic assistant helps balance the load quickly and accurately.   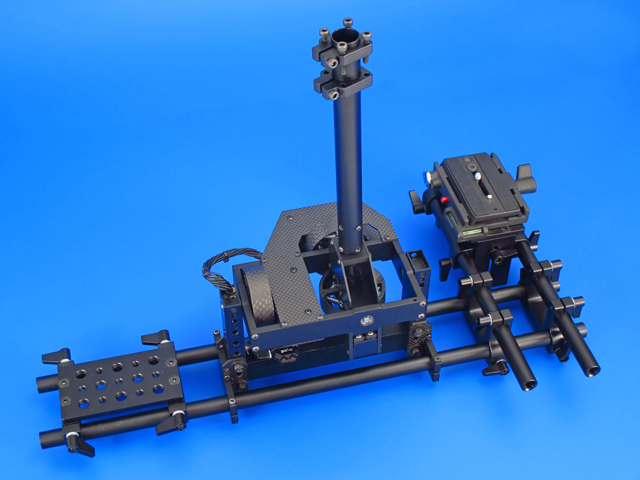 
  Aleksey Zaitsevsky, 2015, Pointer.one |